Robots de transporte para aparcamientos mecánicos: análisis comparativo de dos sistemas de engranaje telescópico
Prefacio
A medida que los recursos de suelo urbano se vuelven cada vez más escasos, los garajes mecánicos inteligentes de estacionamiento tridimensional se han convertido en la solución central para expandir el espacio de estacionamiento en distritos comerciales, comunidades residenciales y centros de transporte público. Como la unidad de ejecución principal del garaje tridimensional, la estabilidad operativa, la eficiencia de acceso, la adaptabilidad y la seguridad del equipo de transferencia de vehículos determinan directamente la capacidad operativa general y la experiencia del usuario del garaje.
El transportador de peine telescópico para garajes mecánicos tridimensionales presentado en este artículo es un equipo especializado de transferencia de vehículos desarrollado para diversos garajes inteligentes tridimensionales y sistemas de estacionamiento de desplazamiento plano. Abandona el modo tradicional de transferencia con bandeja de vehículo y adopta una tecnología de peine telescópico sin plato con enclavamiento, realizando de manera eficiente acciones clave como la traslación del vehículo, el acoplamiento del elevador y el acceso preciso a la plaza de estacionamiento. El siguiente texto, en combinación con el escenario de uso completo del suelo del equipo, analizará en profundidad los detalles refinados de su diseño eléctrico y explicará de manera integral el valor práctico y las ventajas técnicas del producto.
En comparación con los métodos de transferencia tradicionales, las ventajas principales de este transportador de peine telescópico se concentran en tres dimensiones: alta adaptabilidad, alta estabilidad y alta seguridad. El producto adopta un diseño estructural ligero y compacto, adaptable a vehículos civiles con diferentes distancias entre ejes y alturas de chasis, superando las limitaciones de tipo de vehículo de los equipos tradicionales. Gracias a un sistema de control eléctrico maduro, logra un arranque/parada suave a baja velocidad y una transferencia estable a alta velocidad, mejorando significativamente la eficiencia de acceso del garaje. Está equipado con un conjunto completo de mecanismos de protección de seguridad eléctrica, adaptable a las condiciones de trabajo complejas de garajes con humedad, polvo y operación continua a largo plazo. Al mismo tiempo, el diseño de distribución eléctrica modular reduce en gran medida la probabilidad de fallos del equipo y la dificultad del mantenimiento posterior.
Los transportadores de peine telescópico actualmente en uso se dividen en dos tipos según su método de accionamiento: uno accionado por motores ordinarios y el otro por servomotores. No hay diferencia en sus principios de acción, pero hay una gran diferencia en el diseño de transmisión y el diseño de control eléctrico.

Peine telescópico servo

Peine telescópico con motor trifásico
Como se puede ver en la figura anterior, ya sea desde la estructura del equipo o la disposición eléctrica, son completamente diferentes. A continuación, se analizarán en detalle las diferencias entre ambos desde una perspectiva eléctrica, centrándose en los puntos de diseño eléctrico del transportador controlado por servo.
Análisis profundo de los detalles de diseño eléctrico
I. Principio de detección
El principio de detección de los dos transportadores es básicamente el mismo. Debido a las diferencias en el diseño de la estructura mecánica, los métodos de detección son bastante diferentes.
1. Método de diseño del sensor de posicionamiento

Los sensores de posicionamiento de los dos transportadores, uno utiliza un interruptor magnético y el otro un interruptor retroreflectivo.
Ambos métodos de posicionamiento dependen de que el sensor encuentre el bloque de posicionamiento para posicionarse.
2. Detección del sensor de retroceso del peine telescópico

Interruptores de retroceso del peine telescópico delantero y trasero en la versión con motor trifásico

Sensores de retroceso en posición del peine telescópico delantero y trasero en la versión con servomotor
El método de detección del retroceso del peine telescópico es el mismo, ambos dependen de detectar la posición del propio marco del peine para activar el interruptor.
3. Detección del sensor de extensión del peine telescópico

Interruptores de extensión del peine telescópico delantero y trasero en la versión con servomotor

Extensión en posición del peine telescópico delantero y trasero en la versión con motor trifásico
El método de detección de la extensión en posición de ambos dispositivos es el mismo; el principio es que después de que la aleta telescópica toque la rueda, se detecta la señal del sensor de activación.
4. Detección de posición de elevación/descenso

El método de detección de posición de elevación para ambos dispositivos es básicamente el mismo; el interruptor está fijo y la finalización de la elevación se determina detectando si la elevación ha alcanzado la posición requerida.
II. Sistema de control eléctrico
1. Diseño del sistema de hardware de control eléctrico
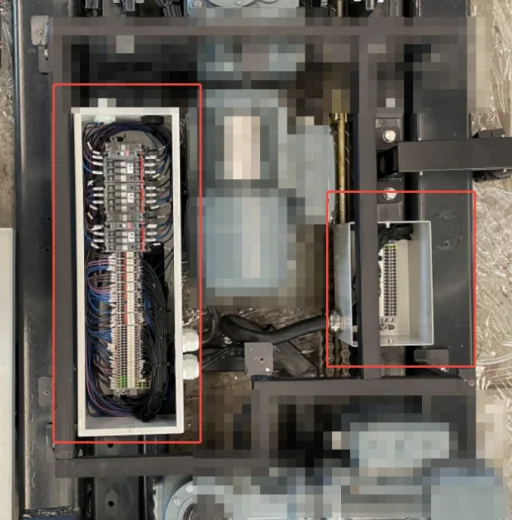
El dispositivo servo adopta una arquitectura eléctrica modular distribuida. El sistema de control general consta de cinco unidades principales: controlador PLC principal, módulo de accionamiento servo, módulo de detección de sensores, módulo de ejecución telescópica y módulo de interacción de comunicación. Cada módulo opera de forma independiente y trabaja en coordinación. El diseño modular tiene ventajas significativas: por un lado, el cableado del circuito es ordenado, las particiones de línea son claras y las corrientes fuertes y débiles están separadas, evitando eficazmente la interferencia cruzada de líneas y reduciendo la probabilidad de fallos de cortocircuito y fuga; al mismo tiempo, el diseño de interfaz eléctrica estandarizada se adapta perfectamente a los sistemas de control de garajes tridimensionales predominantes en el mercado, con una fuerte compatibilidad.

El diseño de la cubierta transparente antipolvo permite observar la situación interna sin quitar la cubierta, maximizando la comodidad del mantenimiento. La caja de control está aislada del punto de fijación del equipo mediante una almohadilla amortiguadora, y la mayor parte de la vibración durante la operación del equipo puede ser absorbida por la almohadilla de aislamiento. Además, todos los terminales de cableado utilizan sujeción por resorte para eliminar la holgura del cableado causada por la vibración del equipo.
El transportador tiene un sistema de control completo, por lo que el transportador servo puede existir como un producto estándar, requiriendo solo una fuente de alimentación trifásica, y el resto se puede controlar mediante comunicación inalámbrica.
La caja eléctrica en el transportador de la versión con motor trifásico solo está equipada con contactores y terminales de cableado. Debido a las limitaciones de espacio, el sistema de control no puede integrarse dentro del transportador, y las señales y salidas de control del equipo deben enviarse a la periferia para su control. Por lo tanto, este transportador necesita estar conectado con dos conjuntos de cables: un conjunto es el sistema de corriente fuerte para controlar la salida del motor, y el otro conjunto es el cable para recoger todas las señales de control del transportador. Los dos conjuntos de cables tienen muchos núcleos, y se requieren dos conjuntos de carretes de resorte externos para el control de recogida de cables. En términos de control de costos general y estabilidad del equipo, no es tan bueno como la versión servo.
2. Diseño del sistema de control eléctrico
El equipo está equipado con un circuito de control lógico inteligente de alta precisión, que se basa en el sistema de control central PLC y el algoritmo de control de bucle cerrado del accionamiento servo para lograr un control preciso de todo el proceso de desplazamiento, extensión, alineación y transferencia. El sistema de control tiene lógica de auto-adaptación incorporada. Según el peso del vehículo, la distancia entre ejes y la desviación de la posición de estacionamiento, ajusta automáticamente la carrera del peine telescópico y la trayectoria de desplazamiento para lograr una transferencia precisa del vehículo sin desviación. Al mismo tiempo, el circuito integra funciones de autodiagnóstico de fallos y retroalimentación inteligente. Durante la operación, monitorea en tiempo real el estado de la línea, los datos del sensor y las condiciones de trabajo del motor. Una vez que ocurre una anomalía, activa inmediatamente una alarma audible y visual y registra el código de fallo, subiéndolo simultáneamente al sistema de control central del garaje, facilitando al personal de mantenimiento la resolución rápida de problemas. Además, admite funciones como arranque/parada automática, elevación vinculada y programación inteligente, adaptable a la operación colaborativa de múltiples dispositivos, mejorando significativamente la eficiencia general de acceso del garaje.
En comparación con el sistema de control servo, el control tradicional con motor trifásico depende de un convertidor de frecuencia. El control del convertidor de frecuencia es muy inferior al sistema de control servo en cuanto a lograr un posicionamiento preciso, y la velocidad de respuesta del motor también tiene una brecha significativa. Estas dos diferencias principales llevan a una clara diferencia en la velocidad de acceso; el sistema servo es un 30% más rápido que el sistema con motor trifásico.
Sin embargo, el motor trifásico tradicional no está exento de ventajas. Debido a que utiliza un motor ordinario, tiene bajos requisitos ambientales y funciona de manera estable en entornos de alta temperatura, alta humedad y vibración. Además, no depende de la comunicación para el control, eliminando directamente la posibilidad de retraso en la operación del equipo o pérdida de control debido a la velocidad de comunicación o fallo de comunicación. El transportador generalmente se utiliza junto con un carro transversal, utilizando un solo PLC para controlar tanto el carro transversal como el transportador, lo que es más oportuno, estable y controlable en términos de interacción de datos internos.
Resumen
Lo anterior es el análisis y comparación de las dos estructuras diferentes del transportador de peine telescópico. Como componente central del garaje tridimensional, los dos transportadores tienen sus propias ventajas y desventajas, y deben combinarse según los diferentes proyectos. En el futuro, a medida que la industria del estacionamiento inteligente continúe actualizándose, el producto seguirá optimizando las tecnologías de control eléctrico inteligente y ahorro de energía, adaptándose a escenarios de estacionamiento más inteligentes e intensivos, proporcionando soporte de equipo central para mejorar la calidad y eficiencia del transporte estático urbano y expandir el espacio.
About the Author

Shay Chen
Marketing Manager en CoPARK, dedicado a promover soluciones de estacionamiento automatizado y a construir alianzas en mercados globales.